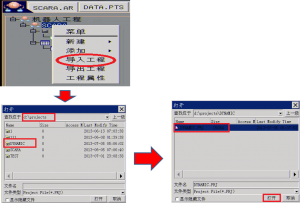
- 首先要将“模板工程”通过FTP拷贝到控制器D盘的PROJECTS目录下,然后在“编程”页面,点击工程助手“ 小橙球”可以呼叫出工程菜单,长按相应的图标可以弹出扩展菜单,按如下操作,即可导入一个工程:
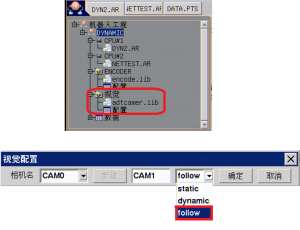
- 长按ENCODER中【配置】,选择打开,可调出编码器配置画面,选择编码器通道(M5 or M6)类型和分辨率,点击初始化,如果配置成功,可以看到“当前值”有数据在变化当传送带移动的时候。
- 编码器当前值随传送带运动增大,则方向为正,反之须取反;

- 长按视觉中“配置”,选择打开,弹出“视觉配置 ”界面;选择新建,这里我们需要选择相机的类型是“follow”。
- 1,视觉的网络信息,输入相应视觉系统的IP和端口号。
- 2,视觉的触发方式,距离触发是指传送带移动固定的距离机器人会给视觉一个IO信号来触发视觉拍照;输入触发是通过外部传感器来触发视觉拍照,同时这个信号也触发机器人记录这个视觉数据对应的流水线位置。
- 3,堵塞方式的选择,是指是否死等待视觉数据,要等到阻塞时间到才退出,如果是多相机,一般选择unblock,也就是不阻塞。
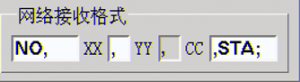
- 4,网络接收格式,指视觉发送给机器人的数据格式;
- 5,标定,编码器脉冲当量、用户坐标标定、视觉与机器人标定,
- 6,工具坐标系标定。
- 7,动态抓取参数配置。<见后面详细介绍>

- 网络模式:UDP、TCP_Client、TCP_Server三种。
- UDP通讯协议须:配置视觉的IP和端口(注:视觉的IP须与控制器IP:
- 192.168.0.123在同一个网段);通讯台界面可监控到视觉发送的数据。
- TCP_Client通讯协议:指的是控制器作为客户端,视觉作为服务器;此处须配置视觉的IP和端口号(注:视觉的IP须与控制器IP:192.168.0.123在同一个网段);通讯台界面不能监控到视觉发送的数据。
- TCP_Server通讯协议:指的是控制器作为服务器,视觉作为客户端;此处配置的也是视觉的IP和端口号(注:视觉的IP须与控制器IP(192.168.0.123)在同一个网段,端口号Port可直接配置成 -1);通讯台界面可以监控到视觉发送的视觉。
- 注:(1)网络模式配置对象是机器人; (2)IP和Port的配置对象是与机器人通讯外围设备的IP地址和端口号。
- 三种触发方式:距离触发、输入触发、距离+输入触发
- 距离触发:指的是传送带每移动一定的距离,控制器打开对应的输出端口来触发相机拍照;须根据电气接线设定对应的输出端口和拍照范围;
- 输入触发:通过外部传感器来触发视觉拍照,同时这个信号也触发机器人记录这个视觉数据对应的流水线位置;须根据电气接线配置输入端口号;
- 距离+输入触发:两次拍照得到工件的坐标,外部传感器触发相机第一次拍照后,传送带移动设定的距离后再通过输出信号触发相机第二次拍照;须设定输入端口、输出端口和拍照范围。
- 网络数据接收分block(阻塞式) 和unblock(非阻塞式) 两种。
- 阻塞方式:发送触发信号后,程序会在阻塞时间内一直停留在接收数据的 那一行函数,AR程序会继续执行直到接收视觉发送过来的数据;若堵塞时间设置为0,程序会死等停留在数据接收函数那一行直到接收到视觉发送的数据。
- 非阻塞方式:发送触发信号后,不管有没有接收到视觉发送来的数据,AR程序也继续执行。
可接收多种格式的视觉数据,例如:
- 没有起始位和结束位:XX,YY,CC;
- 有起始位,没有结束位:NO,XX,YY,CC;
- 没有起始位,有结束位:XX,YY,CC,STA;
- 有起始位和结束位:NO,XX,YY,CC,STA;
- 其中:NO代表起始位;STA代表结束位;XX,YY, CC 分别代表视觉X,Y, C轴坐标;
例如:
- 视觉发送300,100,30;这样的数据,则网络数据格式需配置成XX,YY,CC;
- 视觉发送1,300,100,30;这样的数据,则网络数据格式需配置成NO,XX,YY,CC;
- 视觉发送300,100,30,OK;这样的数据,则网络数据格式需配置成XX,YY,CC,STA;
- 视觉发送1,300,100,30,OK;这样的数据,则网络数据格式需配置成NO,XX,YY,CC,STA;
坐标标定
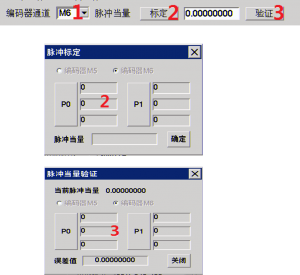
1.编码器通道选择:M5 or M6(根据2.1章节的编码器配置);
2.脉冲标定:
- (1)机器人末端安装一标定针并在传送带确定一个MARK点(在机器人的工作范围内);
- (2)手动移动机器人使标定针针尖到达MARK点,之后点击【P0】;
- (3)开启传送带一段距离后停止确保MARK点仍在机器人的工作范围内,手动移动机器人使标定针针尖再次到达MARK点,之后点击【P1】;脉冲当量标定完成。
3.脉冲当量验证:
- (1)手动移动机器人使标定针针尖到达MARK点,之后点击【P0】;
- (2)开启传送带一段距离后停止确保MARK点仍在机器人的工作范围内,手动移动机器人使标定针针尖再次到达MARK点,之后点击【P1】;误差值计算
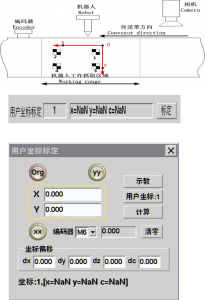
具体的操作步骤,是这样的:
- 1、点击用户坐标的【标定】按钮,就可以进入用户坐标的标定界面
- 2、 选择“org”,移动机器人,用标定针末端在传送带上打一个mark选择点(O点),然后点击“示教” ;
- 3、选择“xx”;沿传送带方向移动传送带一小段距离,移动机器人使标定针末端再次到达mark点,然后点击“示教”;
- 4、选择“yy”,用标定针的末端去触碰传送带上任意一个点,然后点击“示教”;
- 5、选择要存放用户坐标的坐标号(假定用户2),点击“计算”。
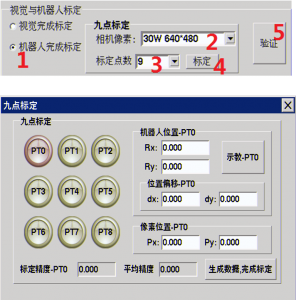
- 1.点选“机器人完成标定”;
- 2.配置所用相机像素;
- 3.选择标定点数:9点or16点;
- 4.点击【标定】按钮,进入【九点标定】界面完成标定(下一节详细介绍);
- 5.点击【验证】完成验证(后面详细介绍)。
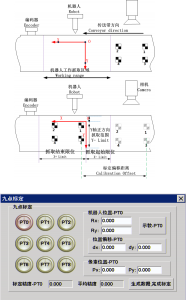
- 1,设定用户坐标标定步骤生成的用户为当前用户;
- 2,标定纸固定在视觉工作区域;识别标定纸中的四个点(九个点)的像素值;
- 3,移动标定纸到机器人的工作区域,记录标定偏移距离并写入到位置偏移(负值)一栏;
- 4,将步骤2和 步骤3中的九个点的用户坐标和像素 坐标一一对应写入到【九点标定】界面的机器人位置和像素位置一栏;
- 5,数据输入完成后,点击“生成数据,完成标定”。
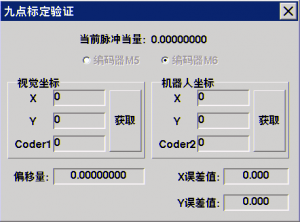
1.在传送带上放一个MARK物体(处于视觉视野范围),并训练模板识别该MARK物体;
2.点击“视觉坐标”中的【获取】按钮获取MARK物体的视觉坐标;
3.启动传送带运动一定的距离使MARK物体运动到机器人的运动空间,手动移动机器人使标定针到达MARK物体的中心位置,然后点击“机器人坐标”中的【获取】按钮。
4.查看X误差值和Y误差值是否在误差允许的范围内。
- 是否从机:一条流水线多台机器人协同作业(默认不开启);
- 工艺运行最大时间:根据传送带和机器人运行速度设定;
- 位置补偿时间:补偿机械手在沿传送带方向上的滞后;
- 采样周期:根据编码器分辨率设置,若分辨率为131072,则设置1~5ms;若分辨率为10000,则设置50ms左右;若分辨率为4096,则设置100ms左右;
- 抓取起始&结束限位,抓取正&负限位参照动态抓取示意图设定;
- 采用周期5 工艺时间1500
- 确保机器人是非使能状态,可以查看手持器的上方,机器人图标颜色是否为“灰”
- 刚开始启动时机器人速度倍率设定为50%
- 启动传送带,速度0.1m/s左右
- 钥匙开关打到自动档
- 启动程序,若程序运行且能接收数据,且外围设备工作正常,在轨迹监控界面观察到机器运动轨迹,则工程运行正常
- 至此,程序能正常工作了,要切换到真实机器人运动,只需要“停止—–上使能—–启动”
- 注意事项:1.一定要先了解客户用于做动态抓取的相机是否支持网络通讯协议(TCP/IP 或UDP);2.安装机器人时必须确保机器人的底座水平或垂直;3.确保传送带安装牢固同时确保传送带平台必须平整且保持水平;
4.必须确保相机安装牢固,其位置不会受外界环境的影响轻易产生偏移要求相机安装与视场垂直;
5.机器人用户坐标系的标定,必须是在用户坐标系0情况下标定;
6.若相机发送的同一物体相邻两次拍照的X轴坐标差值不为相机拍照间隔距离,则有可能是相机的匹配分值太低造成的;
7.动态跟随过程中拍照的高度与标定的高度尽量保证一致。


评论前必须登录!
注册