准备工作:
- 机器人末端安装一个同心的标定针;
- 九点或16点标定板固定于视觉的视野范围中;
- 视觉软件训练模板用来识别标定板中的9个点;
- 正确配置基本参数:IP、触发格式、阻塞方式、网络接收格式;
- 手动单次触发相机拍照一次性获取九个点或16个点的像素值;
步骤1:选中“手动标定”选项;
步骤2:用户坐标标定(一般省略):两点法;
步骤3:选中 “机器人完成标定”、配置所用相机像素、选择标定点数(9 or 16);
步骤4:点击【标定】进入九点标定界面:
①将标定纸中序号1~9的点的机器人位置和像素位置依次输入到PT0~PT8中;
②设定位置偏移(对于静态视觉此参数为0);
③点击“生成数据,完成标定 ”按钮,之后关闭;
④点击视觉配置右上角的保存按钮。
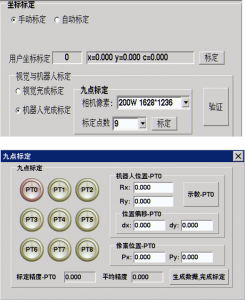
①坐标系选择(默认为0&0);
②在视觉范围内移动标定纸,定位某一个mark点;点击“获取”自动获取视觉坐标;
③手动移动机器人,使标定针的针尖到达定位的mark点,点击“获取”;
④根据X和Y的误差值来验证标定的精度。
注意事项·:
- 安装于机器人末端用于标定的标定针,须确保与丝杆同轴;
- 用于九点标定的标定纸中的九个点应尽量占满3/4以上的视觉视野范围,并且九个点的中心位置尽量处于视野的中心位置;
- 标定过程中标定纸一定不能移动;
- 九个点的像素坐标和世界坐标(机器人基坐标或用户坐标)一定要一一对应;
- 九点标定完成后相机和机器人的相对位置一定不能改变,一旦改变需重新进行九点标定。
- 应尽量确保AR程序中用到拍照点的高度与自动标定过程中的高度一致;
- 标定完成后,需要点击视觉配置主界面右上角的保存按钮。


评论前必须登录!
注册